凸集合
空でない集合内の任意の2つのベクトル
と、
を満たす任意の実数
に対して、
凸集合と非凸集合のイメージを下に記します。

凸関数
凸集合上で定義された関数
が、
内の任意の2つのベクトル
と、
なる任意の
に対して
また、内の
なる任意の2つのベクトル
と、
なる任意の
に対して
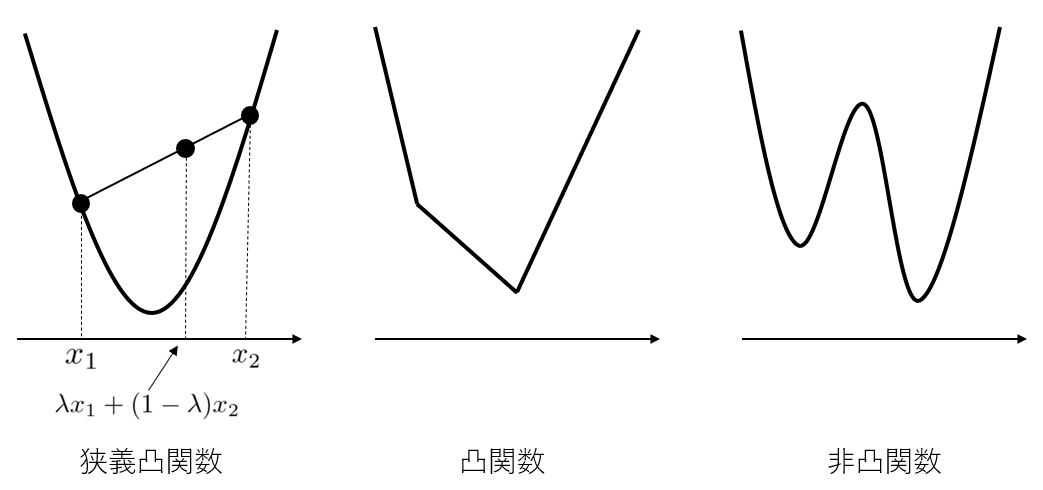
狭義凸関数と凸関数と非凸関数のイメージを下に記します。
なお、凹関数という言葉もありますが、凸関数と凹関数は上下が逆になっているだけで、いずれも凸性を有しており、
両者に本質的な違いはありません。
凹関数という言葉は個人的にあまり使われないように思います。
凸関数とヘッセ行列の関係について、次の定理が成り立ちます。
定理1(証明略)
凸集合上で2回連続微分可能な関数
が
凸関数であるための必要十分条件は、そのヘッセ行列が
上で半正定値となることである。
定理2(証明略)
関数のヘッセ行列
が
上で正定値ならば、
は狭義凸関数である。
ただし、その逆は成り立たない。
最適化問題
最適化問題とは、「ある制約条件の下で特定の関数を最小化、あるいは最大化する問題」のことです。
最小化、あるいは最大化の対象となる関数を目的関数といいます。
目的関数として、次元ベクトル
の実関数
を考えます。
目的関数の最大化は
の最小化と等価であるので、以後最適化問題とは最小化問題のことであるとして進めます。
最適化における制約条件は、一般に次のように書けます。
式
以上をまとめると、最適化問題とは、
「実行可能領域
式で書くと、
式
大域的最適解といいます。
一方、実行可能領域内のある点が、その近傍のどの点よりも目的関数を小さくできる時、
その点を局所的最適解といいます。
下図に1次元の場合の大域的最適解と局所的最適解の例を示します。

式で示した最適化問題において、実行可能領域が凸集合であり、目的関数が凸関数の場合、
この問題を凸計画問題といいます。
凸計画問題については次の定理が成り立ちます。
定理3(証明略)
最適化問題が凸計画問題であれば、局所的最適解は大域的最適解である。
さらに、目的関数が狭義凸関数のとき、大域的最適解が存在すれば、唯一である。
偉人の名言

面白きこともなき世を面白く住みなすものは心なりけり
高杉晋作
参考文献
続・わかりやすいパターン認識 p291-p297
動画
なし